Katherine Mao
Software Development Engineer at Amazon Global Robotics
Engsci 2T1 + PEY

Gallery










Work Experience
DevOps Developer (Co-op)
CaseWare International Inc., Sept 2020 - Aug 2021
This past year I have been completing my Co-op term at CaseWare International as a DevOps Developer. I worked on a number of projects including developing an internal CI/CD Manager tool, supporting a new SDLC and trunk-based development, and day-to-day oncall tasks.I was the major contributor on a new internal CI/CD Manager tool for deploying microservices with Github Actions pipelines. I helped develop a Django based web app to track code changes, trigger and manage deployments, control role based access, and report metrics.

Logo from caseware.com
As a full-stack developer on this project, I've worked on every aspect of the app including:
- provisioning resources using Terraform
- application code in Django and Python
- Role Based Access Control integrated with Active Directory
- writing custom APIs using Django REST Framework
- frontend UI with JavaScript and Bootstrap
- complete unit and integration testing
I also worked on a major project to improve the SDLC and support Service Mesh in our EKS clusters. I authored a number of scripts using Python, Docker, and Github Actions to route traffic within the clusters by dynamically generating routing rules manifest files with Helm templating.Lastly, I maintained and improved existing pipelines on Jenkins and Bamboo and supported developer teams with pipelines, access, and infrastructure requests as a rotating on-call responder.
Robotics Engineering Internship - Autonomous Navigation
Cyberworks Robotics, Summer 2020
Logo from cyberworksrobotics.com
In the summer of 2020, I interned at a robotics company specializing in autonomous wheelchair and floor cleaning robots. Since the opportunity was remote, I worked extensively with simulations in AWS Robomaker. I analyzed the performance of different path planning algorithms and improved obstacle avoidance of the navigation stack in ROS and C++. I also did extensive testing of the navigation stack by running batch simulation jobs overnight in a high fidelity hospital world with moving objects. I then reviewed, documented, and addressed any collisions and 'close calls' flagged during these tests.I also developed support for multi-floor navigation by expanding the UI in PyQt to allow map switching and adding elevator operation into the navigation plan. This involved identifying the touch points during elevator usage and ensuring the design is safe and intuitive in all modes of operation.
Summer Technologist - Interactive AI Eduation Tool
SteamLabs, Summer 2019

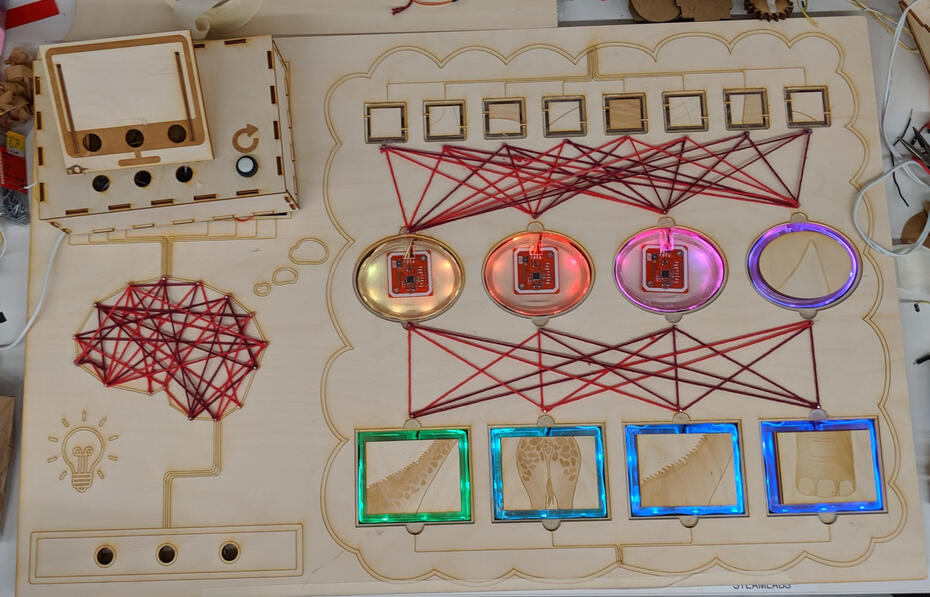
I worked on this project during the summer of 2019 at SteamLabs. I helped develop an elementary school level education activity about Artificial Intelligence with an emphasis on application and social impacts. The board itself is a critical part of the activity, as the board modeled a neural network that the students were able to build themselves. The students would then modify and tweak the network by validating it with plastic toy animals placed in front of a camera and running a real time object detection model on the camera feed. We used the Coral Development Board, Google's new Linux based single-board computer, for its on board processing unit capable of running machine learning models. The interactive elements included RFID and I2C technology, as well as Neopixels and physical design elements.
I was the lead hardware designer of this project, and my role involved the design and fabrication of both the presentation and functionality of the board. This included research and selection of electronic hardware components, integration of electronic hardware, Arduino and Python programming, digital design and fabrication including laser cutting and soldering.

Backend Web Development
EATLAB, Summer 2018

In the summer of 2018, I interned at EATLAB, a food industry data analysis start-up in Thailand. I worked on back end web development for their internal API using JavaScript, Node.js, and MongoDB. My main responsibilities involved implementing error checking and handling web requests between APIs and writing an API that connected their databases to their algorithms. I also built the first version of a working test bench for the backend APIs using Mocha and Chai, which greatly improved the testing process for when more APIs were added.Logo from eatlab.tech
Emotion Recognition - Literature Review
D-LAB KMUTT, Summer 2018
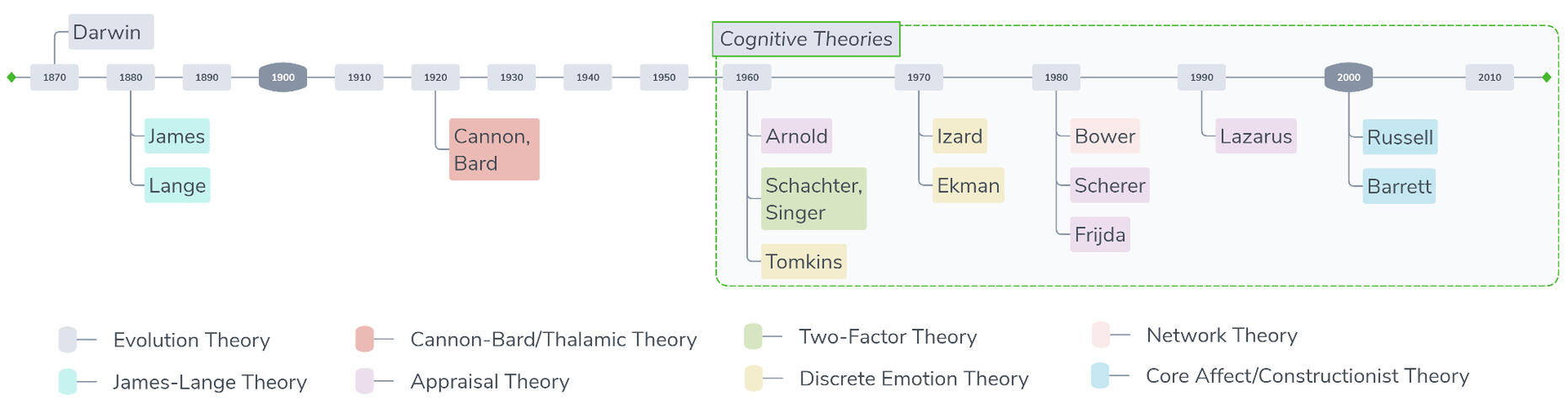
I worked on this project during the summer of 2018 when I was a research intern at King Mongkut's University of Technology Thonburi in Thailand. I worked in Jonathan H. Chan's Data Science and Engineering Lab in the School of Information Technology and collaborated with an international team. The goal of this project was to create an integrated multi-modal system for emotion recognition to aid in the understanding of human emotion and the way it impacts our lives. We reviewed and analyzed over 70 academic papers on the theories, methods, and emerging technologies of emotion recognition in the field of machine learning and data science.The article was published in the proceedings of the 10th International Conference in Advances in Information Technology.
DOI: 10.1145/3291280.3291788
Projects
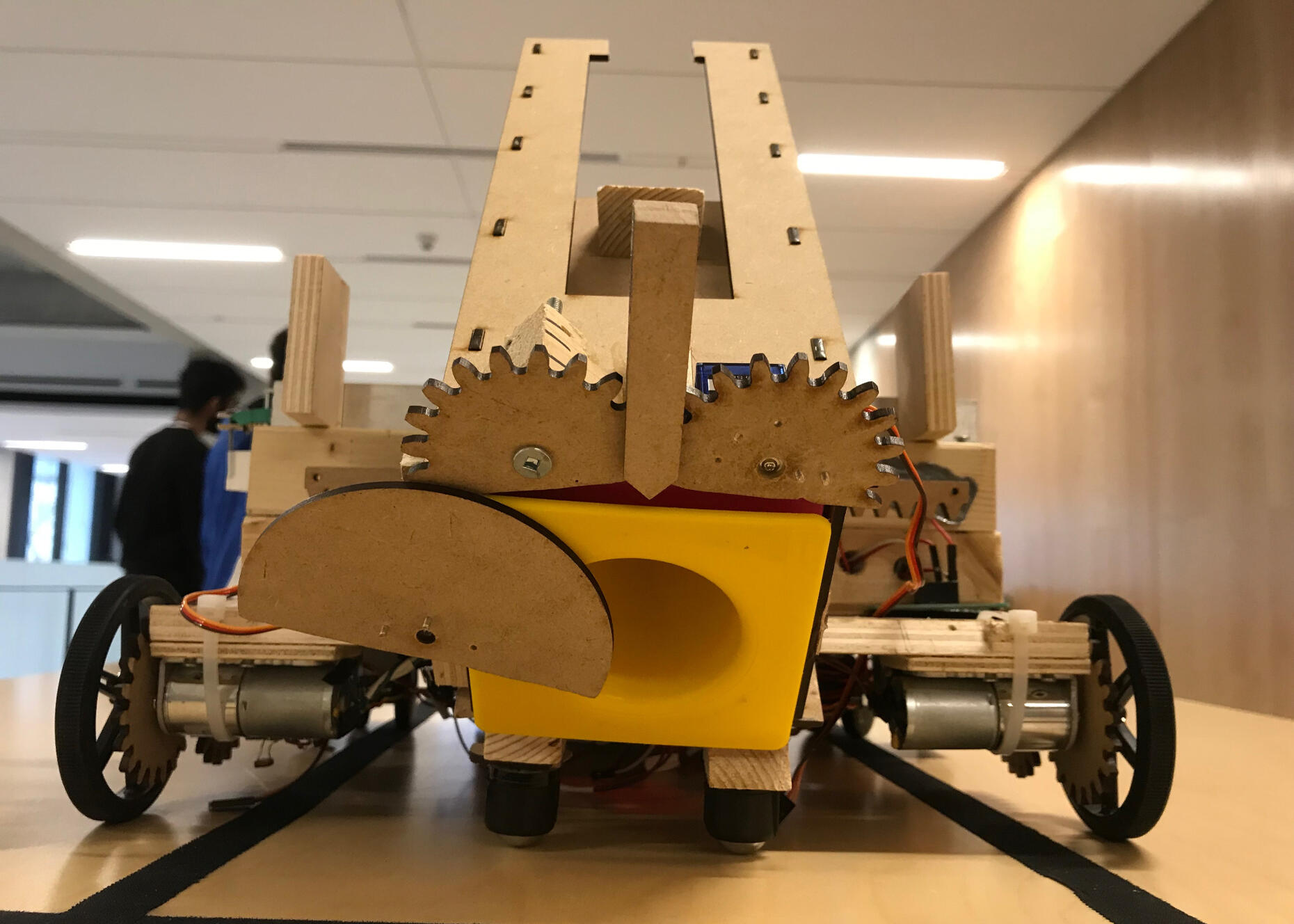
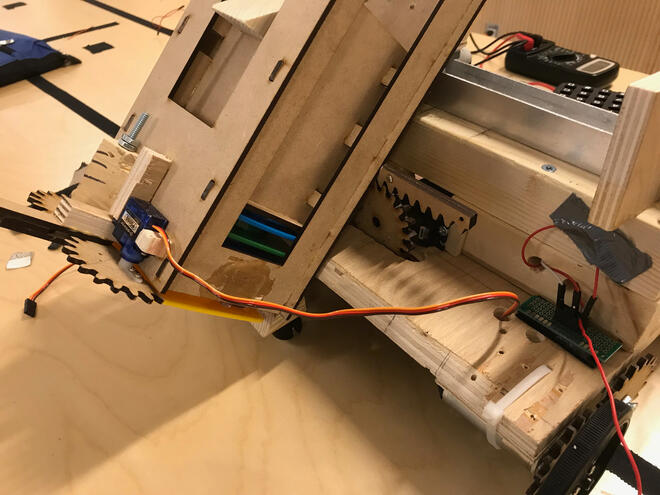
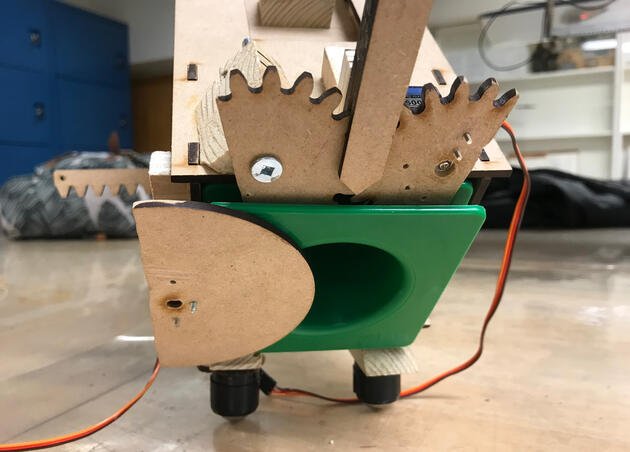
Autonomous Cone Deployment Robot, 2019
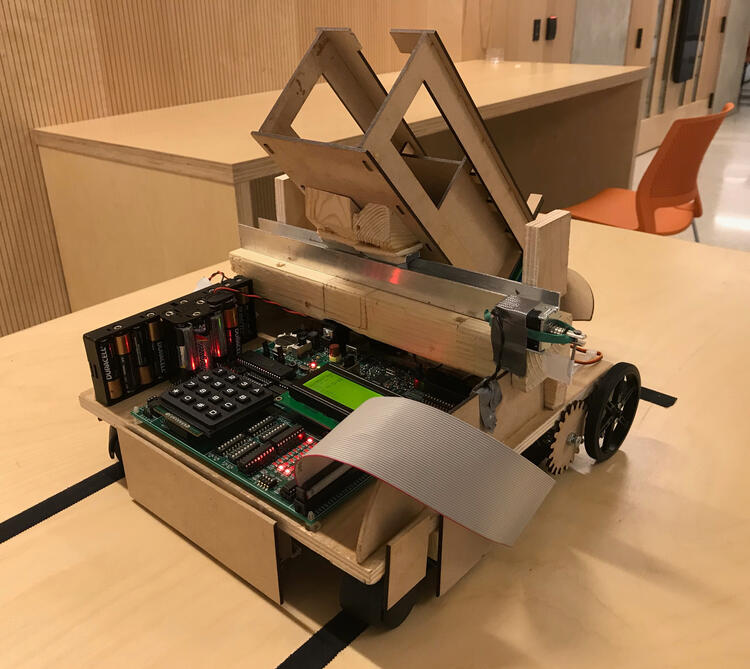
This was for a second year Engineering Design course in which each team of three students was instructed to design and build an autonomous robot capable of dispensing mini traffic cones along a course. Our robot was able to follow a line representing the road and detect pieces of black tape representing "holes" or "cracks" on the road using photoresistor circuits sensors. The cones were stacked in a diagonal tube to optimize placement stability and horizontally placed with a rack and pinion system controlled by a servo motor. Lastly, the cones were dropped with a two level gate system.As the electromechanical lead of the project, I was responsible for designing and building the frame, incorporating actuators, and mounting circuitry and microcontroller elements onto the robot. Some major design considerations include stability of cone deployment, accuracy in cone placement, and straight line drive. The modularity of the design is for easy access to various parts, as problem areas can be isolated for testing and debugging purposes. The fabrication involved machine shop work, hand tools, and lasercutting.

Autonomous Mail Delivery Robot, 2020

This was the final project of a third year Introduction to Robotics course. The purpose of this final project was to apply the different types of controls learned in class, particularly PID control and Bayesian Localization, and design a control system for a mail delivering robot. The robot was to autonomously traverse a given map that modeled the hallways of the Galbraith building using line following and be able to localize and stop at desired offices represented by squares of different colours for delivery. A sample map is shown to the left.The robot platform used to implement our design was the Turtlebot3 Waffle Pi by Robotics Inc. that runs on the Robot Operating System (ROS).
disPlay - Interactive Wall for Pediatric Clinic Waiting Room, 2018
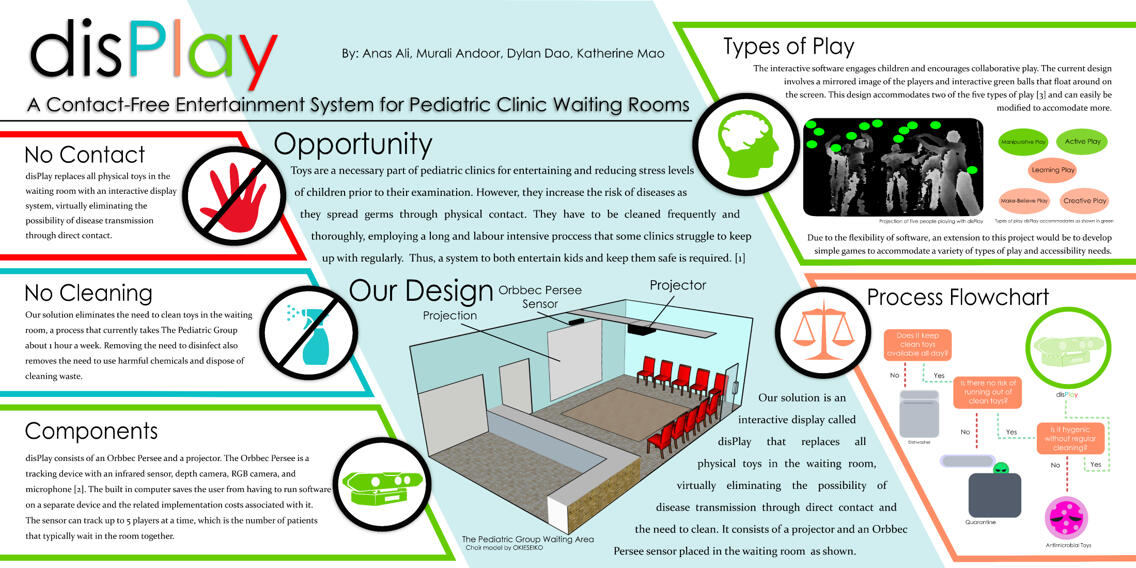
In a first year Engineering Design course, we were instructed to engage with businesses, organizations, and people in the city to find opportunities for Engineering design. One group identified a need for a better system for cleaning toys in the clinic waiting room, and our group abstracted the problem to address the two key issues of keeping children safe and engaged during their wait.We designed and made a high-level prototype of an alternative waiting room activity that promoted cognitive development but reduced the risk of contagion through an Xbox Kinect-like sensor and projection on a wall. We consulted clinic staff for their feedback on the design and engineers of a related reference design. The final deliverable included this display poster, which I designed using Inkscape, and a public showcase with live demos.
Get Over It! - Matboard Bridge, 2017

In a first year Civil Engineering course, we were instructed to design a bridge that would meet specific loading specifications out of Matboard and rubber cement. The completed bridge was 125cm long bridge and sustained 400N in both the train test and Baldwin loading. The design modeled the bending moment diagram, making the moment of area of the cross section proportional to the distribution of the loading. This minimizes the amount of material used for the frame, so that the remaining material can be used as reinforcement diaphragms.The design ultimately failed by buckling in the Baldwin loading at one non-reinforced location. By using all our materials over reinforcing the areas under highest stress, we neglected to make the overall strength of the bridge relatively uniform throughout. We obtained one of the highest scores in construction quality.


Creative Works



Kusudama (Japanese for "flower ball") is a kind of modular origami that involves the production of 30-120 individual units that fit together to make spherical sculptures. Here are some of my favourite designs:
Elegance Kusudama by Origami Kankichi (left), Kusudama Versailles (centre) and Paradigma (right) by Ekaterina Lukasheva.
This is a logo I designed using Inkscape for our team, Dimensionless, at the Eureka International Innovation & Entrepreneurship Competition.


Both of the above necklaces are original designs, using 8x6mm oval crystal beads and aluminum chain.
Spring Awakening is an original composition for piano quintet I wrote based off of a scene from the German play of the same title by Frank Wedekind. It's a coming of age story that deals with the exciting, confusing, and sometimes poignant time we call adolescence. As we follow the characters on their path to self discovery, the piece also warns about the dangers of sheltering children too much for too long.As a senior in high school when I wrote the piece, I see Spring Awakening also as a mark of my own transition from adolescence to adulthood, coming to terms with my own identity, and facing the realities of growing up.
About Me

Hi, my name is Katherine! I'm currently working as a Software Development Engineer at Amazon Robotics based out of Toronto. I'm a graduate of the Engineering Science program at the University of Toronto majoring in Robotics, and I am extremely excited about building tech to transform the way humans interact with the world. I am particularly interested in human-centered and interdisciplinary approaches to design and have a wide range of experiences spanning DevOps, Web Development,
Robotics Engineering, and electromechanical design and fabrication.I also have an Associates diploma in Piano Performance at the Royal Conservatory of Music and am a graduate of the Arts Unionville program majoring on the saxophone. More recently, I was the Music Director for the annual UofT Engineering musical sketch comedy show, Skule Nite.Outside of work and music, I enjoy escape rooms, modular origami, crafting, and playing video games.